











4月19日、北京で世界初の「人型ロボットハーフマラソン」が開催され、各社の開発したヒューマノイドロボットが21.0975キロを走りました。優勝したのは、深センの优必选科技(UBTECH)と北京人形机器人创新中心が共同開発した「天工Ultra」で、2時間40分で走破しました。
今大会のルート情報および全チームの使用ロボットをご紹介します。
2025 人型ロボットハーフマラソン「人形机器人半程马拉松」概要

4月19日に北京にて開催されたハーフマラソンは、人間ランナーの「北京亦庄半程马拉松」と、ロボットがランナーの「暨人形机器人半程马拉松」(HUMANOID ROBOT HALF-MARATHON)の2つに分かれて開催されました。
競技規則によると、参加ロボットは人間型外観を有し、二足歩行や走行動作を実現でき、車輪式構造は不可。制御方式は手動リモコンや自律追従などを選択可能。ヒューマノイドロボットはレース中にバッテリー交換またはロボットの交換によりリレー形式で全コースを完走できます。
そのため、ほとんどのヒューマノイドロボットはスタート時に、リーダー、操作員、エンジニアなどが伴走してレースを開始しました。いわば自動車レースのようなもので、エンジニア、操作員、リーダーなどによるチーム全体の競技となります。今回は、21チームが参加した模様です。
マラソンルート
2025 暨人形机器人半程马拉松の走行ルートは以下の通り
【起点】南海子公园南门——公园南环路——旧忠路——公园北环路——三海子东路——凉水河路——文昌大道——地泽北街——运成街——宏达中路——宏达北路——隆庆街——永昌北路——永昌中路——荣昌东街——经海一路——科创十二街——经海路——科创十四街——科谷二街——经开区国家信创园【终点】

21キロを超えるハーフマラソンのコースは平地と坂道から構成され、最大勾配は9度未満。コース全体は比較的平坦で、左折路6か所、右折路8か所があり、折り返しはありません。ゴール手前には1.5キロメートルの直線区間が設けられ、曲がり角の角度は90度以上となっており、ヒューマノイドロボットチーム向けにコースのGPS座標データが提供されました。
スタート位置では、参加ロボットは「Z」字形に2列に並び、同一列のロボットの前後垂直間隔は3メートル。順次スタートし、各ロボットの出発時間間隔は1分、原則として2分を超えないようにし、参加ロボットは専用コース内で競技を行い、ロボット同士の距離は1メートル以上を保持。他の参加ロボットの正常な進行を妨げないように走行します。
コース左側の道路はレース支援道路であり、先導員を含む各チームは最大3名の選手を同時にコース内に入場させることができます。コース内には複数の補給所が設置され、チームは補給所でバッテリー交換、ロボット交換、またはコース内への選手交代を行うことができます。
今回の人形ロボットハーフマラソンには審判長、主審、随行審判が配置されました。 競技中は審判長が各参加チームに随行審判員を1名ずつ配置し、録音・録画機能を備えた記録装置を装着し、参加チームに同行します。チームがロボットを交換またはバッテリーを交換する場合は、随行審判員に合図し、随行審判員の同意を得た上で交換作業を行います。ロボットがスタートラインを通過した時点で計測開始し、フィニッシュラインを通過した時点で計測停止します。ロボットの成績は競技時間とペナルティ時間の合計となります。






上位6チーム
以下、完走した上位6チームです。
一位:天工チーム(使用ロボット:天工Ultra)
ロボット交換なし(総所要時間 2:40'42、最終タイム 2:40'42)
研究開発企業:北京人形机器人创新中心/优必选科技(UBTECH)
身長1.8メートル。大出力の一体型関節と低慣性脚部構造設計により走破速度に優れた爆発力を発揮し、最高速度は時速12キロメートルに達します。
二位:小顽童チーム(使用ロボット:N2机器人)
ロボット交換1回(総所要時間 3:27'50、最終タイム 3:37'50)
研究開発企業:北京松延动力
身長1.2メートル。最高走行速度は3メートル/秒。横風が発生した場合の影響は比較的少ないのだそう。
三位:行者二号チーム(使用ロボット:行者二号)
ロボット交換2回(総所要時間 4:00'56、最終タイム 4:25'56)
研究開発企業:上海卓益得机器人公司
身長1.7メートル、体重28キログラム。軽量化、高耐久性、高効率を特徴とし、6時間の連続走行が可能。 生物の腱の運動特性を模擬し、高い安全性と柔軟性を備え、最大移動速度は時速8キロメートル。
四位:旋风小子チーム(使用ロボット:N2机器人)
ロボット交換4回(総所要時間 3:46'55、最終タイム 4:51'55)
五位: EAIチーム(使用ロボット:行者二号)
ロボット交換2回(総所要時間 4:45'27、最終タイム 5:10'27)
六位:半醒机器人チーム(使用ロボット:精灵2)
ロボット交換5回(総所要時間 4:02'19、最終タイム 5:27'19)
その他参加チーム

最佳耐力奖(最優秀耐久賞)
天工チーム
最佳人气奖(最優秀人気賞)
行者二号チーム、城市之间科技チーム、钢宝チーム
最佳形态创新奖(最優秀形態革新賞)
行者二号チーム、城市之间科技チーム、钢宝チーム
最佳步态奖(最優秀歩行賞)
行者二号チーム、城市之间科技チーム、亦马当先チーム
ロボット紹介
ロボット別紹介はこちら。今大会で特に話題となったロボットをピックアップします。複数チームが同一の型のロボットを使用するケースもあります。
「天工Ultra」(深圳市优必选科技股份有限公司(UBTECH)・北京人形机器人创新中心(X-HUMANOID))
レース中一度も機体を交換することなく平均時速10キロメートルのペースで安定した走りを見せた天工Ultraは、後続を1時間近い差で突き放して文句なしの優勝でした。
天工Ultraは今回のマラソンのために、本体安定性、軽量化設計、関節の長期運動による発熱問題などハードウェアの課題を克服。加えて運動制御アルゴリズムの最適化により、関節の協調運動能力、歩行協調能力、複雑な地形通過能力をさらに強化したとのこと。そして“一脑多能”“一脑多机”機能を持つ「慧思开物」プラットフォームを搭載し、ロボットが継続的に走行中でも身体のバランスを保てるようにしました。
また、一般的なヒューマノイドロボットの遠隔操作ハンドル方式とは異なり、無線ナビゲーション技術を用いて追従ナビゲーションと長距離経路計画を実行。搭載した運動制御アルゴリズムと多モードセンサーを組み合わせ、超広帯域無線技術を活用し、ロボットの目標追跡、位置計算、リアルタイムでの走行方向と速度の調整を自律的に行いました。

「N2」(松延動力(北京)科技有限公司(Noetix Robotics))
準優勝の「N2」ロボットは「松延动力」社によるもの。当モデルは2チームが使用しました。仕様によると身長1.2メートル、体重30キログラム。小型ながら非常に機敏で、大歩歩行、走破、単脚・両脚跳躍、ダンスなど多様な運動能力を備えています。走破速度は実測で最大時速3.5メートル、価格は3.99万元から。

「行者二号」(上海卓益得机器人有限公司(DroidUp))
2チームが使用した「行者二号」は、業界で初めて筋腱バイオミメティクス(ロープ駆動)を採用したフルサイズ二足歩行ヒューマノイドロボットで、開発会社は「卓益得公司」。第2世代のヒューマノイドロボットなのだそう。

「宇树 G1」(杭州宇樹科技有限公司(Unitree Robotics))
バク転など様々なパフォーマンスを行い、メディアで度々話題に出る「宇树 G1」(Unitree G1)の開発会社「宇树科技」は業務多忙のため、会社としては出場しませんでしたが、当ロボットは別のチームが使用しており独自のアルゴリズムで競技に参加した模様。宇树科技が本気で大会のためにチューニングを行えば天工Ultraといい勝負ができたかもしれません。

「幻幻」
钢宝チームの「幻幻」は、唯一の「美女ロボット」として話題となりましたが、スタート直後に故障してしまいました。

「0306 小巨人」
銀青のカラーリングが目を引く「小巨人」は今回の大会で唯一、職業専門学校チームが設計したヒューマノイドロボットで、開発開始からまだ100日も経っていませんでした。

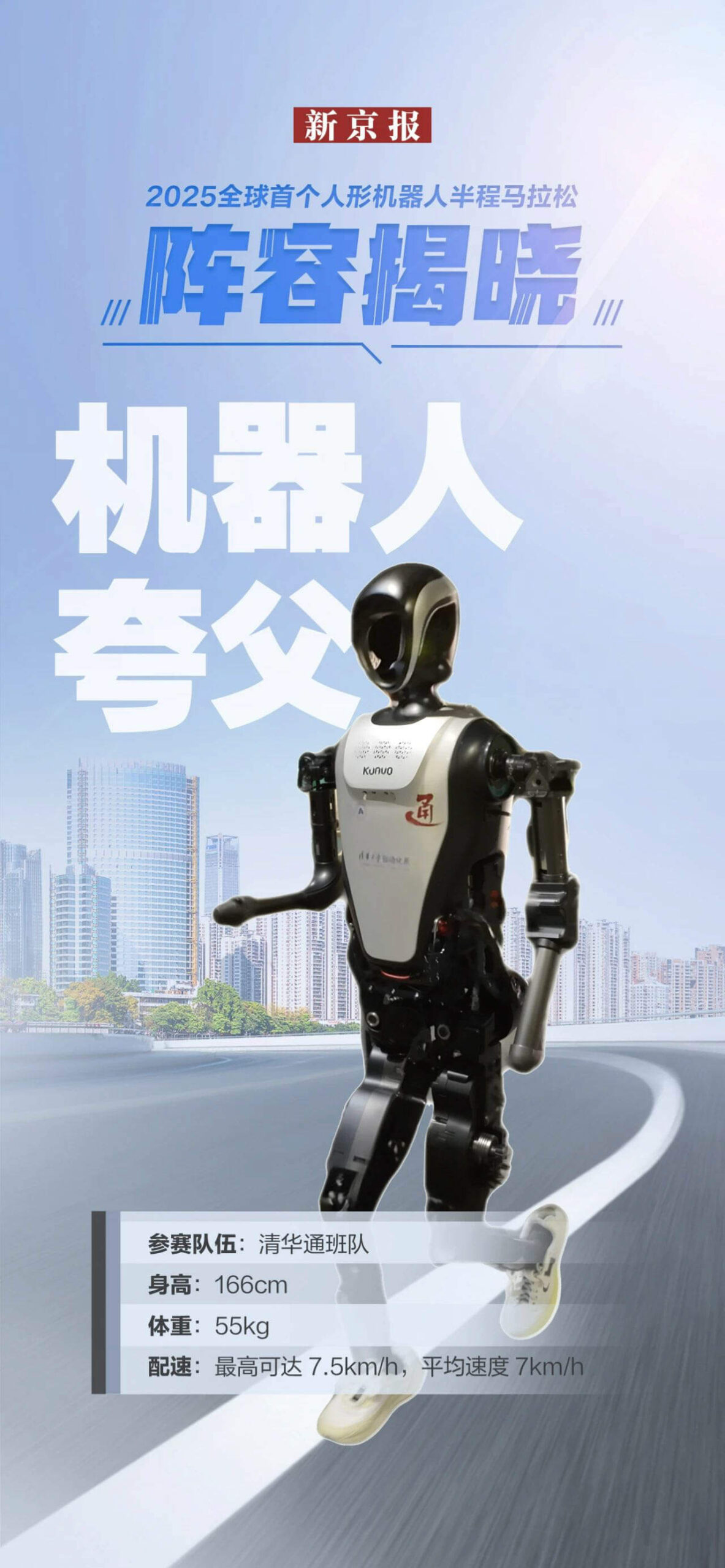
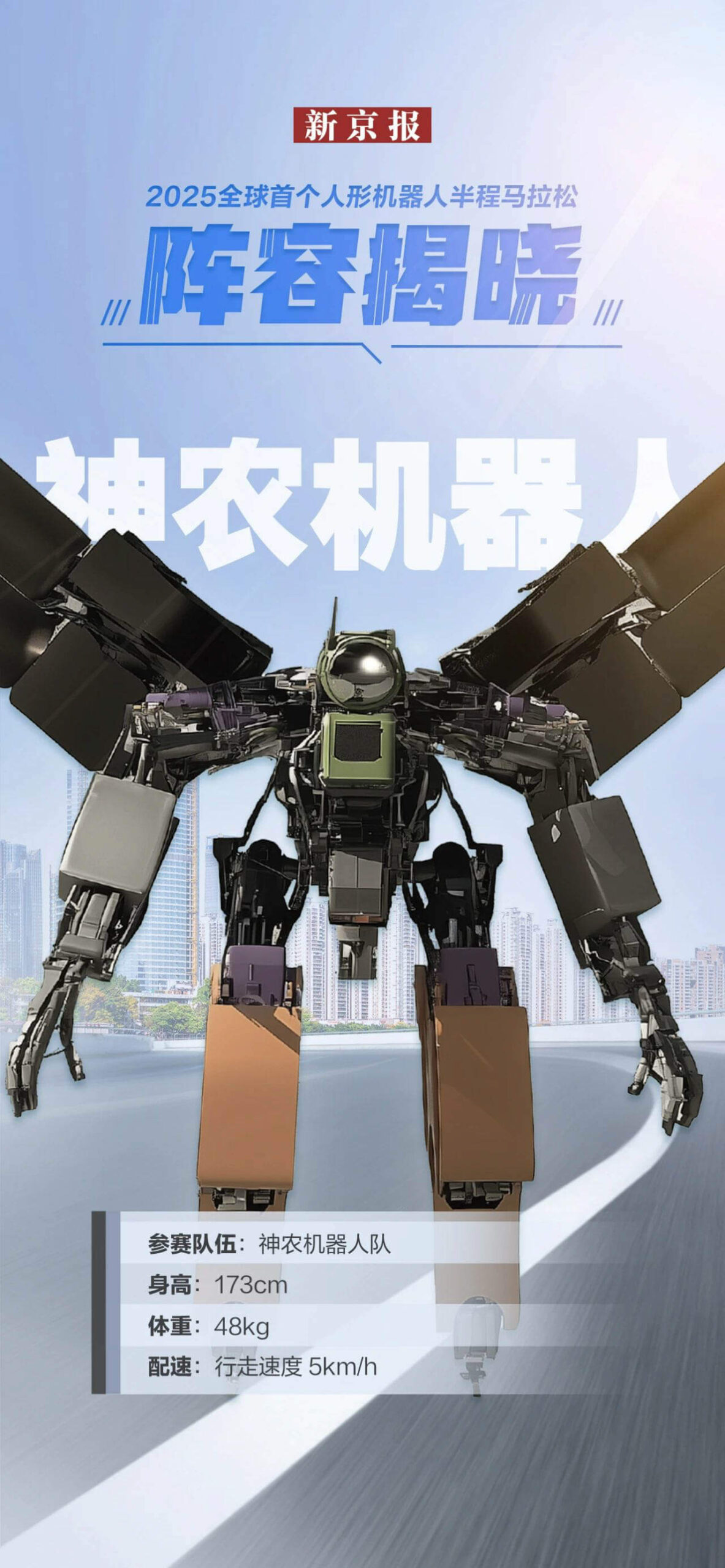
その他出場ロボット










深圳のヒューマノイドロボットサプライチェーン数は中国本土の約4分の1
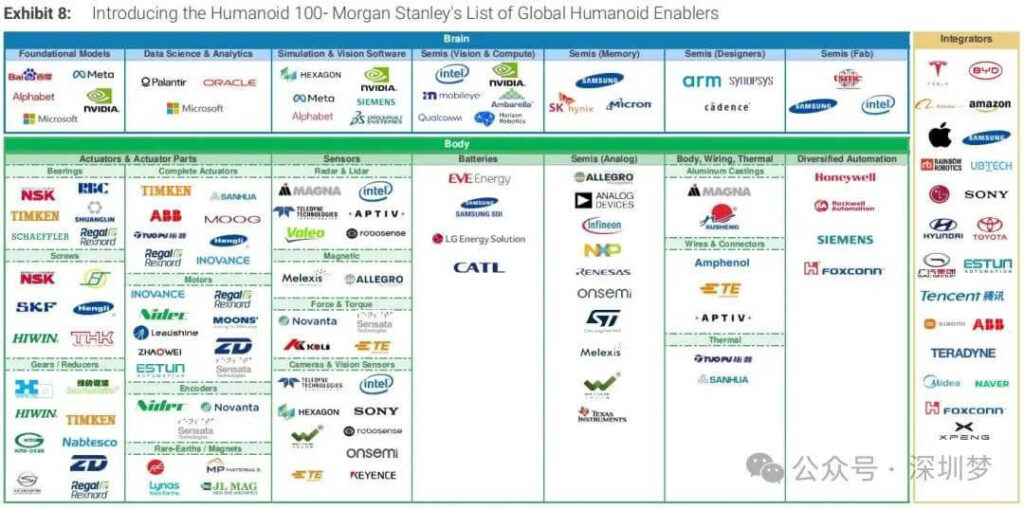
モルガン・スタンレーが発表した「The Humanoid 100: Mapping the Humanoid Robot Value Chain」(ヒューマノイドロボットのサプライチェーンを「脳」「身体」「統合」の3つの核心分野に分類し、世界中の100社の上場企業を紹介)によると、中国本土は32社、うち深圳の企業は約4分の1を占める7社が存在します。
挙げられている深圳の企業は以下の通り
- 比亚迪(BYD)
- 腾讯(テンセント)
- 优必选(UBTECH)
- 速腾聚创(RoboSense)
- 雷赛智能(Leadshine)
- 兆威机电(Zhaowei)
- 汇川技术(Inovance)
当リストは上場企業100社のみピックアップされていますが、サプライチェーン全体の数は数倍に及ぶと思われます。また深圳企業の比率も増えていきそうです。今後も発展を続けるヒューマノイドロボット市場に注目です。
Source:















![深センイベント/プロモーション情報!(6/24-27) [OCT-LOFT] DJ OKAWARIライブ/TEAEXPO/星空音楽会など!](https://i0.wp.com/www.shenzhen-fan.com/wp-content/uploads/2019/06/20190624-Event.jpg?resize=150%2C150&ssl=1)

















